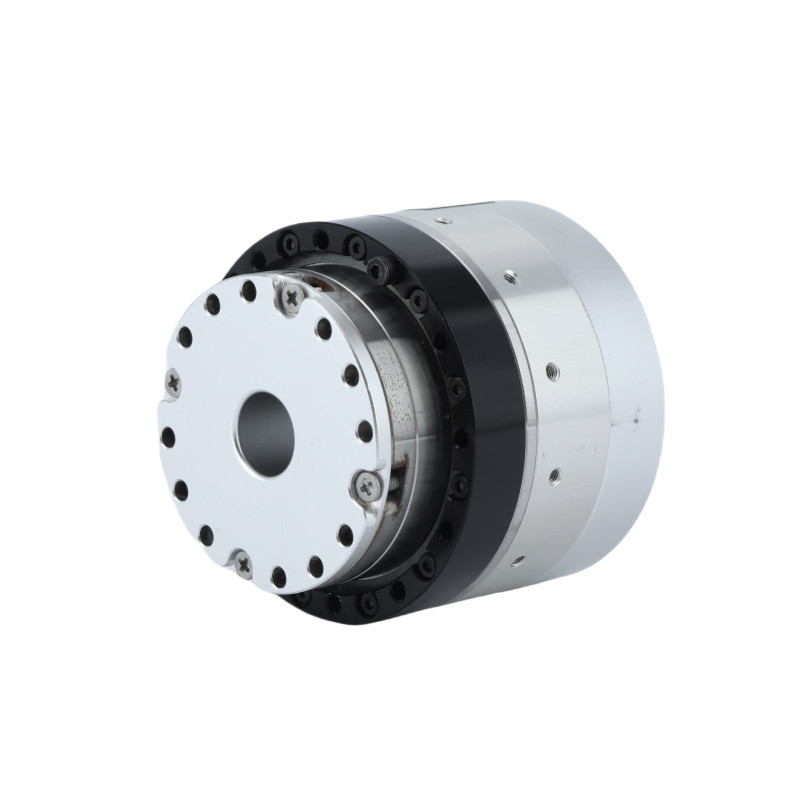
Motor de articulação do robô HPJM-RE50-60-PRO-XX
Interpretação P/N

Descrição do produto
Um motor de articulação de robô é um componente crítico que alimenta o movimento de um braço robótico ou sistemas similares.como a precisão, binário, velocidade e fiabilidade.
Uma vez que o seu atuador rotativo já integra um motor, uma caixa de velocidades e um codificador de alta precisão, é muito adequado para aplicações de articulações robóticas.
As articulações robóticas, às vezes conhecidas como eixos, são as partes móveis de um robô que causam movimento relativo entre os elos adjacentes.Estes elos referem-se aos componentes rígidos que ligam as juntas para garantir o seu funcionamento adequado e direto.
Características
1Excelente desempenho.
Motor de binário, com alta capacidade de sobrecarga, para operação estável e controle de força mais preciso e seguro.
O codificador multi-círculo de alta precisão de duplo valor absoluto está configurado para garantir uma alta precisão de saída e uma precisão de posicionamento repetida de 0,001°.
O codificador de valor absoluto duplo de várias voltas + motor de binário + redutor harmônico de alta rigidez tornam o controle de força virtual realidade.
Grande projeto de eixo oco, para atender às necessidades de fiação central, ao mesmo tempo em que torna a estrutura conjunta mais compacta.
2. Peso leve
Alta eficiência: o algoritmo de controlo vetorial baseado na previsão do modelo garante o controlo de movimento de alta frequência, mantendo um baixo impacto térmico.
3. Longa vida
A precisão do posicionamento é inferior a 0,015 ° e a precisão do posicionamento repetido pode atingir 0,001 °.
4Fácil de instalar.
6 articulações de tamanhos diferentes são fáceis de integrar na estrutura do corpo do robô 6 elementos principais da articulação do robô são integrados em um espaço limitado.
5. Sustentável
Consumo de energia mais baixo, suporte a muitos controladores de marcas tradicionais.
Imagens detalhadas
Ficha de especificações
| Taxa de redução |
51 |
81 |
101 |
| Torque nominal |
N·m |
7.2 |
11.6 |
11.6 |
| Torque máximo ao arranque e à parada |
N·m |
20 |
25 |
30 |
| Torque máximo |
N·m |
37 |
51 |
60 |
| Voltagem do autocarro de corrente contínua 48VDC |
Corrente nominal (com dissipador de calor de alumínio) |
A |
3.6 |
| Corrente máxima |
A |
10.8 |
| Velocidade |
RPM |
68 |
42 |
33 |
| Velocidade máxima |
RPM |
90 |
56 |
45 |
| Codificador absoluto |
Tipo de codificador |
Codificador de múltiplos giros absoluto oco |
| Resolução do codificador (rotação do motor 1) |
17 bits |
| Contador de rotação múltipla do motor |
216(65.536) |
| Reacção |
Arco sec |
20 |
20 |
15 |
| Pode ser personalizado dentro de 10Arc sec |
| Massas |
Sem travão |
Quilos |
0.37 |
| Duração |
mm |
58.4 |
| Através do Buraco |
mm |
12 |
| Massas |
Com travão |
Quilos |
0.55 |
| Duração |
mm |
78 |
| Através do Buraco |
mm |
10 |
| Potência máxima contínua do motor |
W |
150 |
| Tensão de alimentação |
V |
24 a 48 V |
| Bus de comunicação |
Possui |
| Isolamento do motor |
Grau de resistência ao calor:F (((155°C) |
| Resistência de isolamento: superior a 200M Ω ((DC500V) |
| Voltagem resistente ao isolamento: AC1500V ((1 minuto) |
| Mecanismo de proteção (nível de proteção) |
Completamente fechado e auto-refrigeração (IP50 padrão, IP65, IP67, IP68 especiais personalizados) |
| Proporção de engrenagem |
Torque máximo |
Torque máximo admissível com carga média (N.m) |
Torque nominal a 2000 RPM (N.m) |
Velocidade máxima
(RPM) |
Velocidade nominal
(Com 1/2 de binário nominal)
(RPM) |
Reacção de engrenagem
(arcsec) |
| 51 |
23 |
8.6 |
6.6 |
97 |
75 |
20 |
| 81 |
29 |
13.5 |
9.6 |
61 |
46 |
20 |
| 101 |
34 |
13.5 |
9.6 |
49 |
37 |
10 |
| |
Potência nominal
(W) |
Tensão de alimentação
(V) |
Corrente contínua máxima
(A) |
Corrente nominal
(A) |
Resistência
(Ω) |
Resolução do codificador
(Bito) |
Autobus de comunicação |
| 150 |
24 a 48 |
5 |
3.6 |
0.47 |
17 |
Possui |
| |
Constante de binário
(N.m/A) |
Indutividade
(mH) |
Número de pares de pole |
Cabeça oculta
(mm) |
Duração
(mm) |
Massas
(kg) |
Inercia
(g*cm2) |
| 0.089 |
0.215 |
10 |
10 |
82 ± 0.5 |
0.59 |
146 |
Aplicação
|
|
|
| Robôs e Drones |
Braço Robótico Colaborativo |
Linhas de produção automatizadas |
|
|
|
| Máquinas CNC |
Dispositivos médicos |
AGV Logistics |

 Por favor verifique seu email!
Por favor verifique seu email!