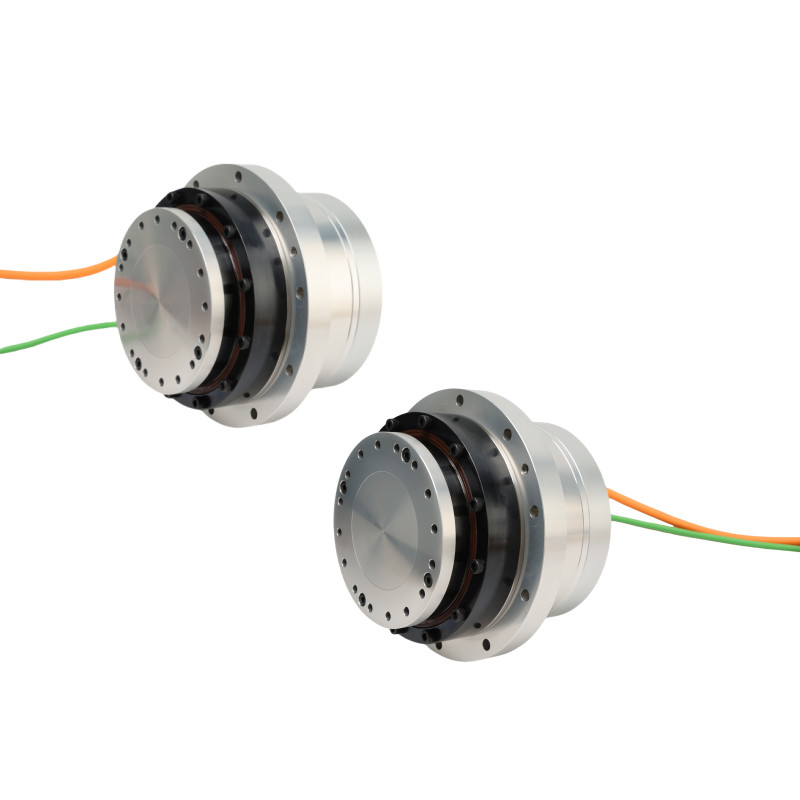
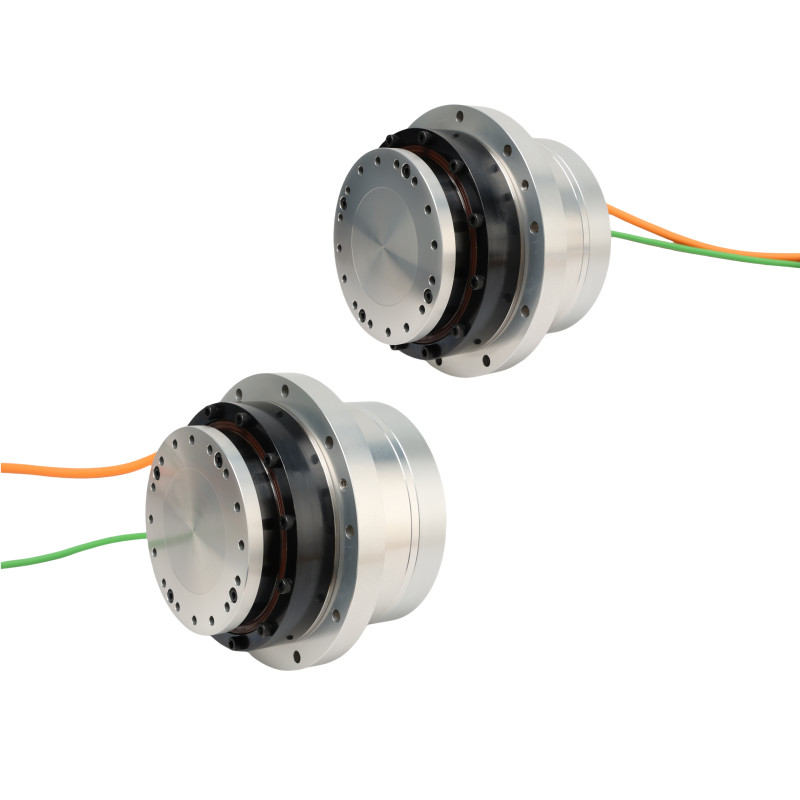
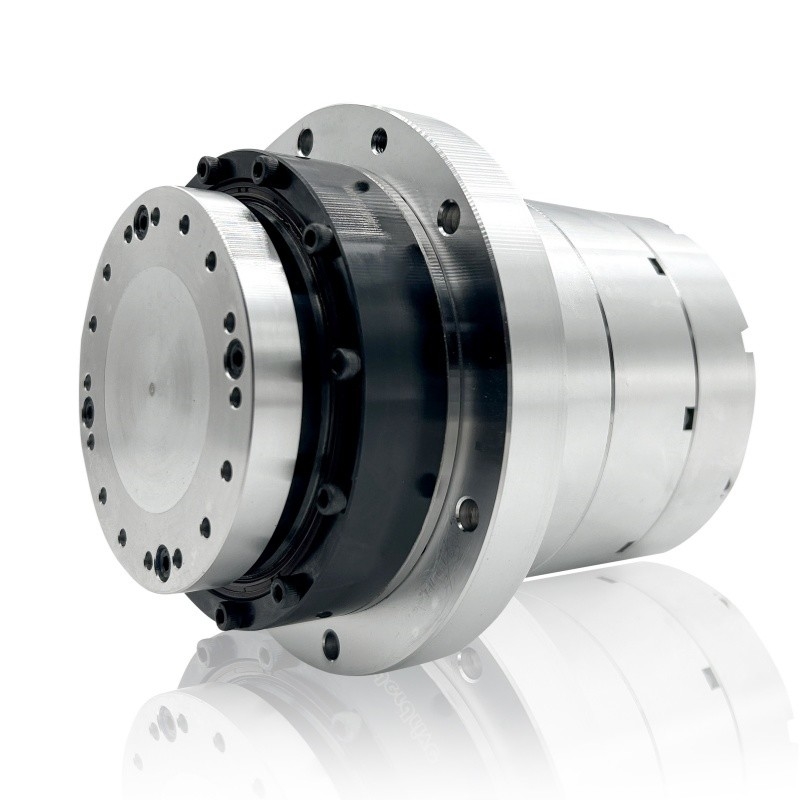
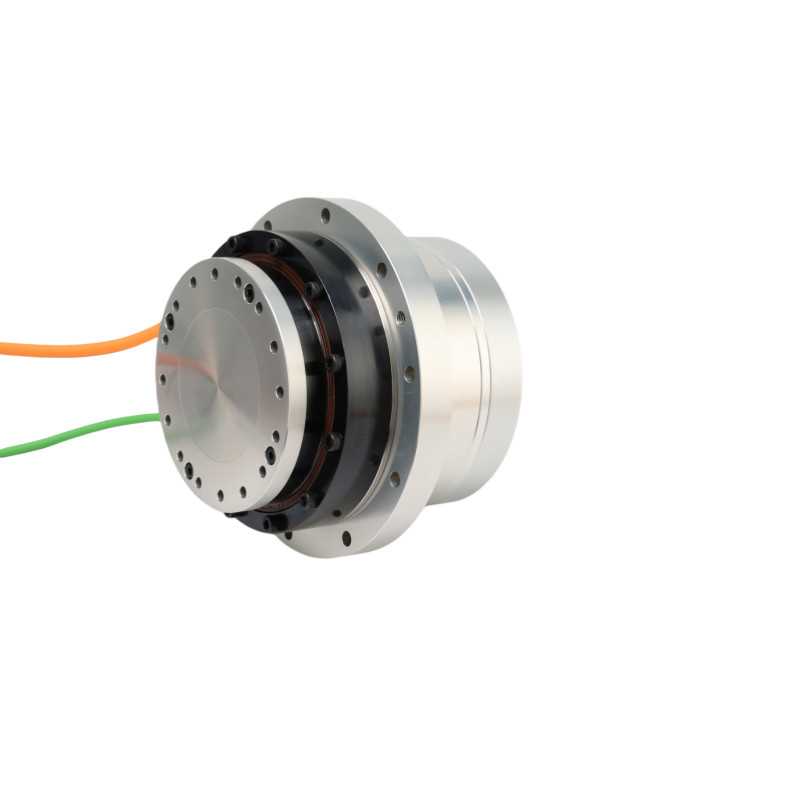
Ativadores rotativos com flanges da série HASF Modelo 25 de eixo sólido de alto binário Proteção IP65Nível
Descrição do produto
Os atuadores rotativos são dispositivos mecânicos projetados para produzir movimento de rotação ou torque em torno de um eixo central.e outras aplicações em que seja necessário um movimento rotativo controlado.
Componentes
1. Corpo do atuador: tipicamente cilíndrico ou em forma de caixa, com os componentes internos.
2. Eje rotativo: ligado ao mecanismo de saída ou carga, traduzindo o movimento rotativo.
3Fonte de alimentação: Dependendo do tipo, esta pode ser pneumática (ar comprimido), hidráulica (pressão de fluido), elétrica (motor elétrico) ou mecânica (engrenagem e ligação).
4- Mecanismo de controlo: rege o funcionamento do actuador, manualmente ou através de sistemas automatizados.
Aplicações
Automatização industrial
1Braços Robóticos: Os atuadores rotativos são componentes integrais de braços robóticos e manipuladores usados em linhas de montagem, operações de pick-and-place e outras tarefas automatizadas.
2Transportadores e manipulação de materiais: os atuadores controlam os movimentos rotativos nos sistemas de transportadores, mecanismos de triagem e equipamentos de manipulação de materiais.
3Máquinas de embalagem: os atuadores facilitam os movimentos rotativos nas máquinas de embalagem para tarefas como vedação, rotulagem e enchimento.
Entretenimento:
1Passeios em Parques Temáticos: Atuadores são usados em animatrônicos e mecanismos de passeio para criar movimentos dinâmicos e simular experiências realistas.
2Equipamento de palco e eventos: Atuadores rotativos facilitam o movimento nas cortinas do palco, luminárias e outros equipamentos teatrais.
Eletrônicos de consumo:
1Eletrônicos de consumo: os atuadores são usados em vários produtos eletrônicos de consumo, como câmeras, smartphones e consoles de jogos, para mecanismos como lentes de zoom, autofoco,e feedback de vibração.
Energia e serviços públicos:
1Atuação de válvulas: Atuadores rotativos controlam válvulas em tubulações, indústrias de processo e serviços públicos para regular as taxas de fluxo, pressão e direção do fluido.
2Energia renovável: Os atuadores são usados em sistemas de rastreamento solar para orientar os painéis solares em direção ao sol para captura ideal de energia.
Serviços médicos e de saúde:
1Equipamento de diagnóstico: Os atuadores rotativos são utilizados em dispositivos médicos, como scanners de tomografia computadorizada e máquinas de ressonância magnética, para posicionar e mover com precisão componentes de imagem.
2Robótica cirúrgica: Os atuadores permitem um movimento e controle precisos em sistemas robóticos cirúrgicos, aumentando a precisão cirúrgica e procedimentos minimamente invasivos.
Ficha de especificações
| Série HAS |
20 |
| Taxa de redução |
51 |
81 |
101 |
121 |
161 |
| 220VAC |
Torque máximo |
N·m |
69 |
91 |
102 |
108 |
113 |
| Torque nominal |
N·m |
30 |
48 |
58 |
61 |
61 |
| Velocidade máxima |
RPM |
98 |
62 |
50 |
41 |
31 |
| Velocidade |
RPM |
51 |
32 |
26 |
21 |
16 |
| Corrente máxima |
Armas |
6.04 |
5.02 |
4.51 |
3.98 |
3.13 |
| Corrente nominal |
Armas |
2.63 |
2.65 |
2.56 |
2.25 |
1.69 |
| Constante de binário |
N m/armas |
11.42 |
18.14 |
22.62 |
27.1 |
36.06 |
| Resistência de fase |
Ohms ((20°C) |
6.2 |
| Indutância de fase |
mH |
7.7 |
| Câmpus EMF traseiro |
Vrms/krpm |
25 |
| 48VDC |
Torque máximo |
N·m |
69 |
91 |
102 |
108 |
113 |
| Torque nominal |
N·m |
39 |
58 |
61 |
61 |
61 |
| Velocidade máxima |
RPM |
86 |
54 |
44 |
36 |
27 |
| Velocidade |
RPM |
51 |
32 |
26 |
21 |
16 |
| Corrente máxima |
Armas |
15.37 |
12.77 |
11.48 |
10.14 |
7.98 |
| Corrente nominal |
Armas |
8.69 |
8.14 |
6.86 |
5.73 |
4.31 |
| Constante de binário |
N m/armas |
4.49 |
7.13 |
8.89 |
10.65 |
14.17 |
| Resistência de fase |
Ohms ((20°C) |
0.4 |
| Indutância de fase |
mH |
0.9 |
| Câmpus EMF traseiro |
Vrms/krpm |
7.7 |
| Codificador absoluto |
Tipo de codificador |
Codificador absoluto |
| Resolução (revolução de motor única) |
um pouco |
23,24 bits |
| Motor contador de voltas múltiplas |
um pouco |
16 |
| Precisão de posição unidirecional |
Arco sec |
≤ 75 |
≤ 75 |
≤ 60 |
≤ 50 |
≤ 50 |
| Repetibilidade da precisão de posicionamento |
Arco sec |
≤ 10 |
≤ 10 |
≤ 10 |
≤ 10 |
≤ 10 |
| Rigididade de reversão |
x104N·m /rad |
24 |
| Rigidez torsional |
x104N·m /rad |
1.8 |
2.3 |
| Momento de inércia |
Sem travão |
kg*m2 |
8.8*10^-5 |
| Com travão |
kg*m2 |
9.17*10^-5 |
| Massas |
Sem travão |
Quilos |
2.4 |
| Com travão |
Quilos |
2.96 |
| Número de postes motorizados |
Polão |
16 |
| Condições ambientais |
Temperatura de funcionamento: 0~40°C
Temperatura de armazenagem: -20°C a 60°C
Humidade de funcionamento/Humidade de armazenamento: 20~80% RH (sem condensação)
Resistência à vibração: 24,5 m/s2 (frequência: 10~400 Hz)
Nenhum pó ou pó de metal, gases corrosivos, gases inflamáveis, névoa de óleo e outros usos em ambientes fechados, evitar a luz solar direta
Menos de 1000 m de altitude |
| Isolamento do motor |
Resistência de isolamento: superior a 100 MΩ ((DC500V) |
| Resistência dielétrica: AC1500V/ 1 minuto |
| Classe de isolamento: F |
| Graus de proteção |
Tipo totalmente fechado, auto-refrigeração (IP65) |


 Por favor verifique seu email!
Por favor verifique seu email!